目前已经跑路大半年了,回想起来在原来的公司也待了近10个月时间。虽然总觉得在那里呆的不舒畅,没有合适的空间,甚至有些不愿提及。但是毕竟待了那么久,即使有什么不满与失意也不应该否定自己曾经的努力。做错了一些事情就更应该直视错误,努力去改正,并从中吸取经验和教训。牢骚就不说了,还是写一些技术上的收获吧!
项目概述
公司需要开发一套送餐机器人管理程序。虽然他们本来就有送餐机器人在卖,但是自己却没有代码,没法开发。(好迷)开发就开发吧,也没什么大不了的。公司方面给我需求是:
- 能够沿着磁轨移动。 主要采用磁导航作为定位手段。
- 通过RFID判断桌号。 每个桌子都有唯一的RFID,读取到对应的RFID就停下提示并等待用户取餐。
- 识别触摸开关信号。 在机器人的手臂边上安有一个触摸开关,当用手触碰时会产生一个高电平信号。该信号作为用户取餐完毕的信号。即用户触碰后,机器人返回厨房。
- 控制界面。 在机器人背后安装一个触碰显示器,显示桌号。服务员点击桌号则机器人开始送餐,并到达预定桌位完成送餐。
- 编辑界面。 如果餐厅布局发送改变,那么要提供一个可以修改的界面。
- 壁障、减速。 在行驶过程中应该能够避开可能的障碍物,一般轨道上会有客人。障碍物的识别是靠底部的3个和餐盘下方的2个红外传感器实现。机器人应该能够提示并及时停止,同时要做到动作缓慢,减少机器人的抖动。
技术要点
从大的方向来说主要的技术有:位于上位机的导航算法、位于下位机的运动控制
导航算法
由于定位手段只有RFID和磁导航,因此不能精确的知道当前位置。只能通过一定的推理得出当前AGV处于某两个点之间。由于系统设计的原因,在运动过程中有诸多限制:
- 转弯角度<60。
- 转弯半径>20cm。
- 同一时刻只能识别一个岔道。
首先,将地图抽象为有向图,每一个结点对应一个RFID。由1)得一些路径是单向的,即不能做到原路返回。3)得在每一个岔道,只需要判断向左或者向右。
算法实现
首先该算法对轨道有一定限制。
- 每个岔道前必须至少有一个RFID来标识。
- 所有轨道都必须是一致的
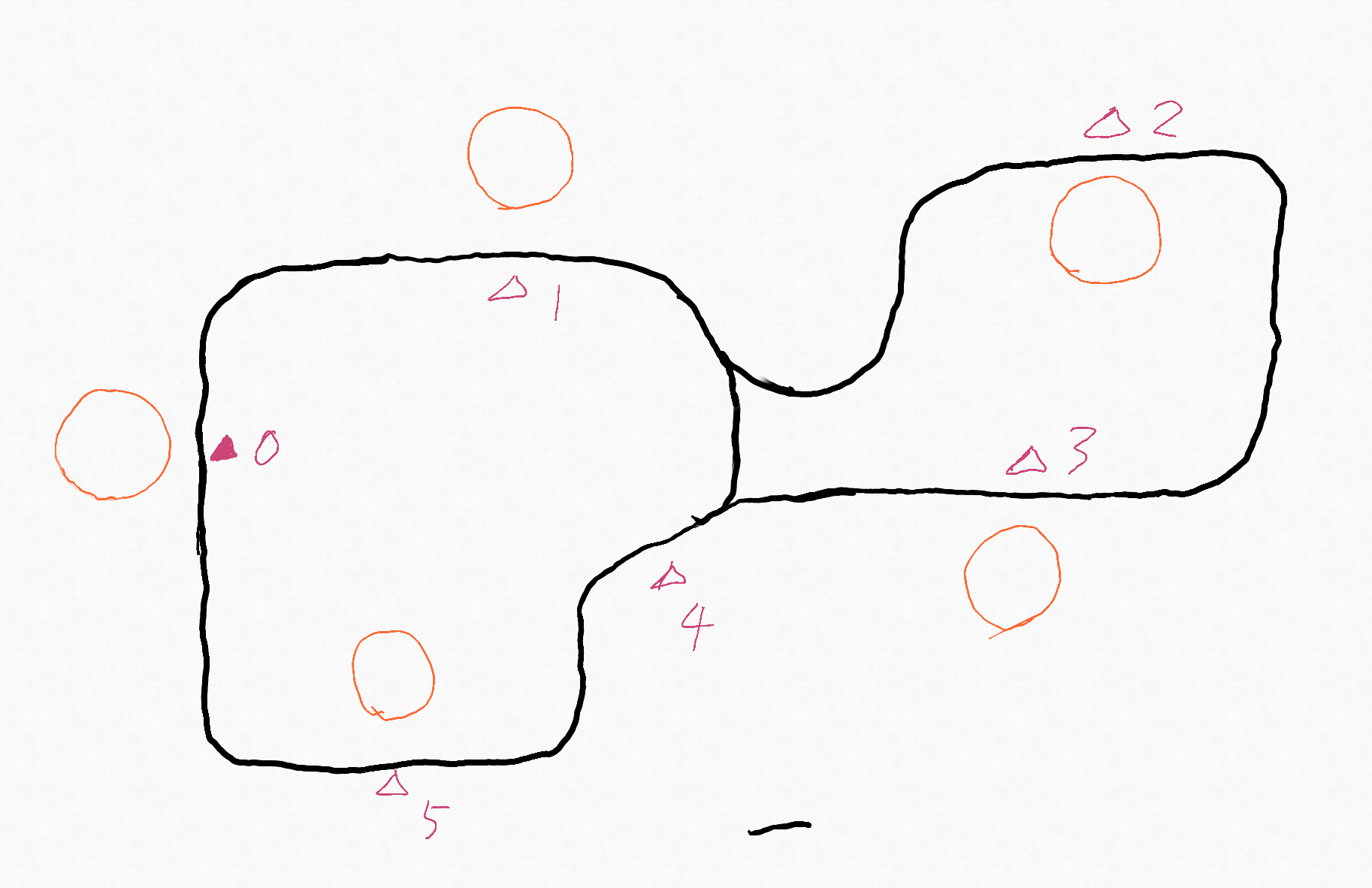
在工作的地方,轨道设计如图一所示。0 表示起始点,一般指餐厅厨房。三角符号表示RFID,圆代表桌位。
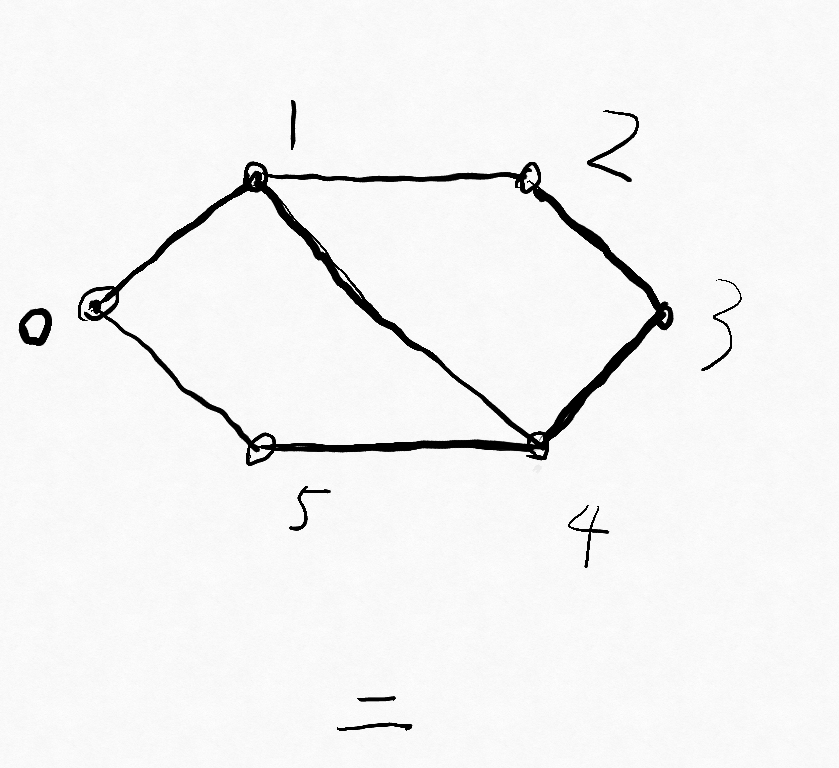
将实际环境中的轨道信息转换成图,存储在计算机中。其结构如图二所示。
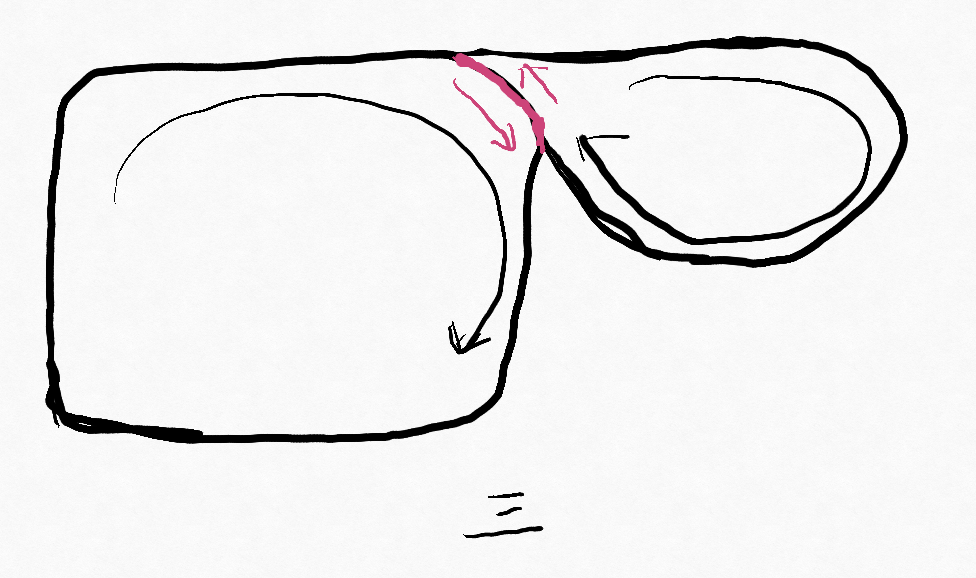
所谓一致,就是当AGV沿着任意轨道顺时针运动时都不会产生冲突。如图三中,假如在左侧有一个AGV顺时针运动,右侧也有一个AGV顺时针运动。那么者两台AGV必将发送冲突(头对头)。其原因在于图中红色的部分使得轨道的方向反转。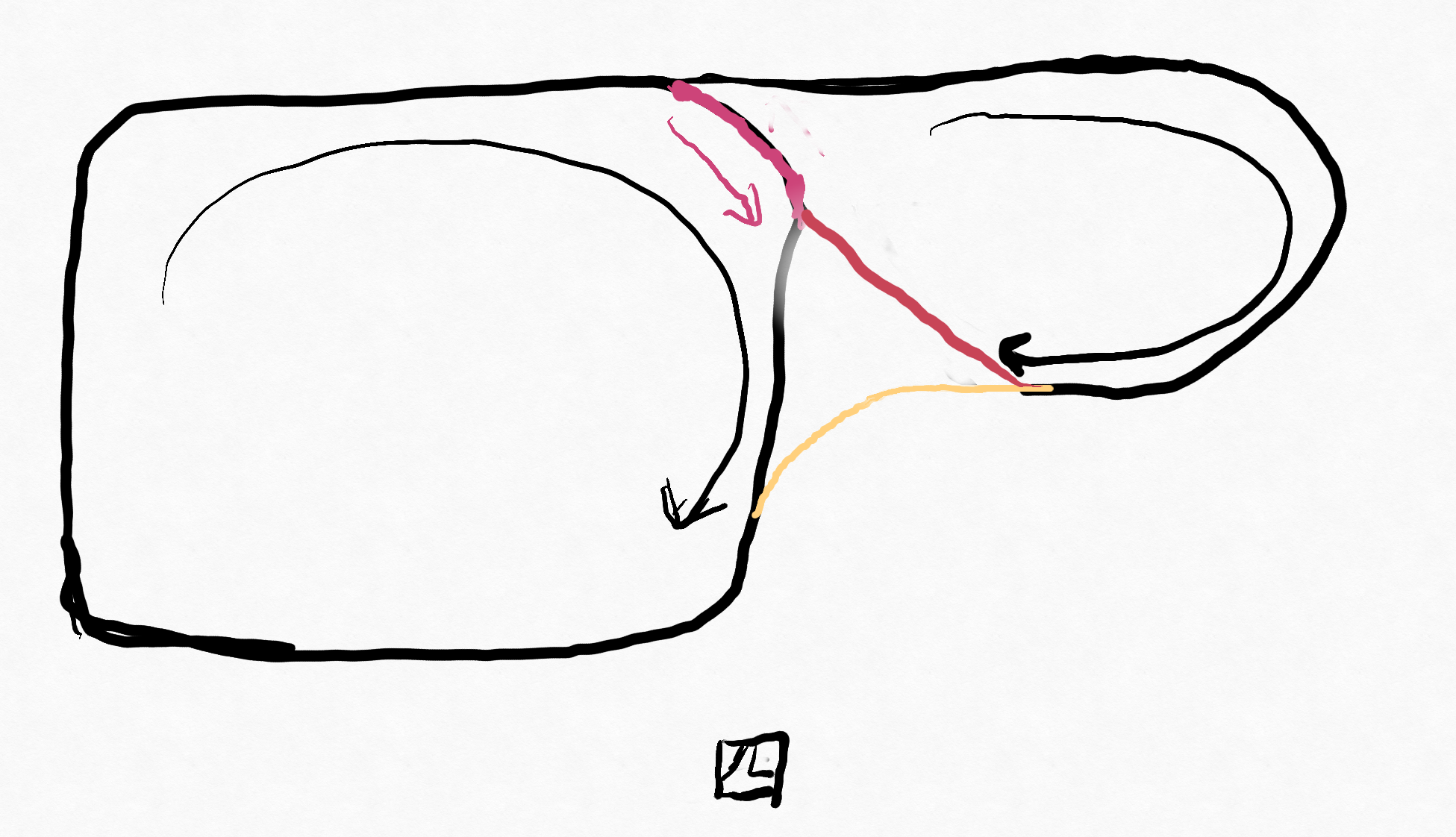
只要按图四中黄色部分修改就可以使得图一致。
然后就可以使用Dijkstra寻找目的地的最短路径。这里还需要一个额外的变量direction来表示当前AGV在轨道的方向。一开始AGV是顺时针的,那么0-1也是顺时针的,因此直行就能到达。而0-5是逆时针的,需要掉头才能到达。只要轨道顺序与当前AGV不一致就需要掉头。
PS:当时我花了大半个月设计、并写好这部分代码,感觉足以应对任何地图情况,并且使用寻路算法大大减少了工作量。心里有点小得意,比他们原来的系统不知道高到哪里去了。后来我又给路径之间增加速度调节功能,让AGV在直线的时候加速,弯道上降速,实现智能变速。可是没想到,当我拿给生产部的同事,他们却觉得太麻烦了,一致觉得还是原来的好。最后我了解到,原来他们的想法是轨道就是一个圆环,只要判断到没到点就可以了。那是我明白了吃了不讨好是怎么一回事。回想到我刚来的时候,上司把这个任务交给我,还给了之前同事做的代码,说这个项目已经快做好了。可是我一看代码却发现就写了很基础的一点,基本上什么都没有。结合来看才明白怎么一回事,原来是什么都不需要,自然也就什么都不必有。
运动控制
项目开发中需要用到的技术有:
- 运动模型
- 定位算法
- 控制算法
- 控制平滑
运动模型
该AGV由位于底盘中部的两个轮子驱动。属于双轮差速模型。
在实际使用中,我发现使用曲率k和速度v来进行控制更加便捷。它与w,v是等价的k=w/v。在一个实际具体的轨道中,每一个位置的曲率总是固定的。因此一旦得到该位置的曲率,那么通过该点速度是无关的。也就是说在我们的控制算法应该计算出轨道的曲率k,然后AGV以曲率k运动,无论AGV的速度是多少,它始终贴合轨道。所以经过这样的调整,v可以作为参数,调整AGV运动的速度而不改变其稳定性。(实际上我即没办法得到轨道的k,也很难保证AGV的运动轨迹。但是实践效果还是挺好的,v在0.1到0.4的范围内都挺稳定)至于为什么不用r与v。首先r理解起来比较困难,k的话跟w差不多。当v不变时,完全可以把k当作w来看待。其次,当AGV笔直前进的时候,用r表示就难受了,到底取多大才够直?
定位算法 (Magnetic localization algorithm)
地磁场的影响比较大, 而且随着车体方向的改变, 地磁的大小也会改变。
消除地磁影响的方法主要有三种:
( 1)多次测量平均法; ( 2)波峰波谷法; ( 3)双传感器微分法
[参考] [1]
磁条磁场分布近似于磁偶极子:
B=\frac{\left(\mu _0 M\right) \left(3 i x z+3 j y z+k \left(-x^2-y^2+2 z^2\right)\right)}{4 \text{$\pi $r}^5}
r为半径,L0 是磁渗透性, M 是磁钉磁矩
然后通过磁场匹配算法、序列算法来确定磁条相对于车体的位置。
三点定位:
我自己提出了一个简化版的磁场匹配算法,只需要取最强的3个点就能使用。实际试验,平均误差约为0.2cm。
设传感器距离磁条中心点的绝对距离为x,磁场分布函数为f(x)。磁传感器的间距为1cm。设当前小车与磁条中心的偏差为a。那么读取到的16个点中最强的3个点为f(a),f(a-1),f(a+1)。然后寻找匹配度最高的a就可用了。
控制算法
控制器尝试了下面2种
- 模糊控制器 这个实验中用的多,我在实际应用的时候遇到了一些问题。效果并不理想。
- PID控制器。最后只用了PD,由于这个计算简单,操作容易,并且效果良好,最后采用了PD控制器。
控制输出曲率K。平滑控制
当速度需要发送改变的时候,如检测到障碍物。速度不能立即降为0,否则AGV立马磕头。没错,是真的磕头。本身这个底盘在设计的时候就不对,驱动轮在中间靠前面一点,后面一个万向轮支撑。然后上面的外壳是玻璃钢制的,特别重而且高,重心这就提到上面去了,加上支撑轮靠后,一个急刹就前倾。我试验了两种平滑办法。 - 固定加速度。 即速度v在每个时间间隔最大只能改变dv。
- 指数逼近。
v=(v_goal-v)*e+v
最后贴上一段视频把
[1] 磁传感系统在室外移动机器人导航中的研究
